



UgCS flight planning software was used to perform the LiDAR survey of the jungle. The flight plan was a corridor mission with a length of 20 km and a width of 200 m. The drone used was a DJI M300 RTK together with DJI L1 LiDAR sensor.
‘In the case of topographic surveying in the jungle, it is difficult to obtain topographic data only through image mapping because the density of trees is high. By using the lidar sensor, it is possible to obtain surface data under the trees, making it possible to create an accurate topographic map’, Alex Song at CLpartner Inc comments.
When flying a Lidar drone in the jungle, CLpartner Inc. opts for UgCS for the following reasons.
1. Planning flights according to construction drawings
Construction work is carried out using precise coordinates. UgCS can import construction drawings in KML format and display them on the map, allowing to plan the flights with a higher degree of accuracy and collect data from only the required regions. Moreover, it is even possible to create flight plans in UgCS from KML files.
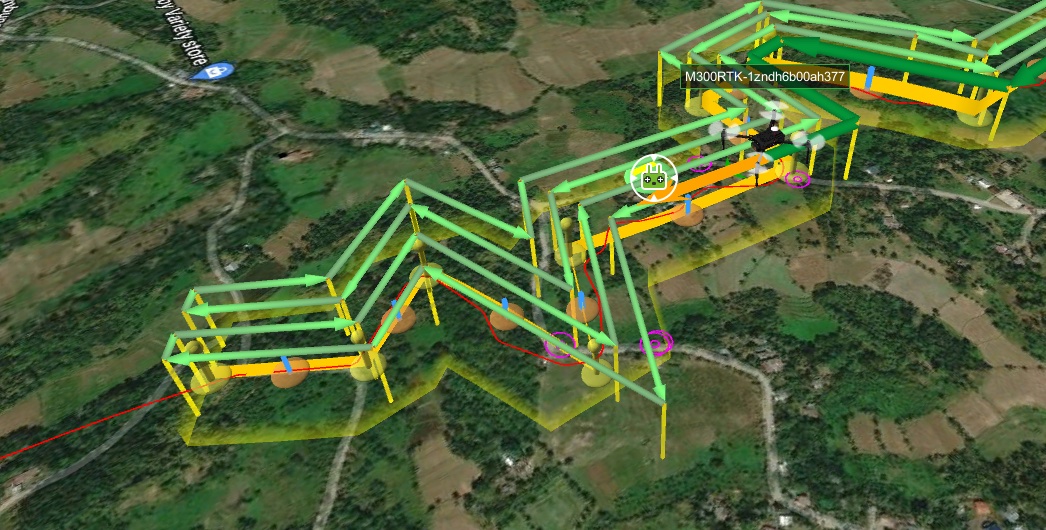
2. Terrain following capability
In order to keep the LiDAR data quality consistent throughout the flight, the drone carrying the sensor must maintain a constant altitude to the ground surface. One of the features of UgCS is the ability to plan flights according to terrain elevation data. By default UgCS is using SRTM4 terrain elevation data but custom data can be used as well. The user can also preview the flight in 3D and compare the planned flight trajectory to the terrain elevation profile.

3. Offline flight planning
One of key features of UgCS is the ability to plan and perform the flights when offline in remote regions of the world. UgCS allows to cache maps and elevation of large areas (up to 100 square kilometers per area) and then use it when performing flights in areas with no internet connection.
4. Route management
For mapping large areas it is necessary to be able to conveniently manage multiple flight missions which is exactly what UgCS excels at. In the 20 km x 200 m area covered by the corridor scans, a total of 20 separate missions were set up and successfully carried out by CLpartner using UgCS and their DJI M300.
All planned routes had an overlap of about 50 m to ensure that no data gets lost. They were stored and managed in UgCS, making it possible to easily switch between them. Moreover, the telemetry from all the flights was automatically recorded.

5. Efficiency improvements
The “LiDAR Corridor Mapping” route algorithm of UgCS calculates that a corridor with a length of 2 km and width of 200 m can be flown at an altitude of 80 m and speed of 6 m/s with a single battery set of the M300 drone.
Due to UgCS performing LiDAR IMU calibration pattern only before and after the mapping flight rather than during it, it is possible to cover more ground with a single set of batteries in comparison to DJI Pilot where the calibration is done every 1 km.
Despite the time between calibrations being longer, the data generated when using UgCS still managed to secure a z-value error of less than +/- 10 cm in comparison to the absolute value.

UgCS EXPERT license includes a toolset designed particularly for LiDAR surveys.
Discover »»»